Le laboratoire Kakogawa de l’Université Ritsumeikan développe des technologies de mains robotiques destinées à automatiser les opérations d’alimentation en matériaux pulvérulents dans les industries agroalimentaire et chimique.
Dans les sites de production, les opérations de dosage et d’introduction de matières premières sous forme de poudre reposent encore largement sur le travail manuel. La réduction de la main-d’œuvre et l’approvisionnement précis en quantités constantes constituent donc des enjeux majeurs.
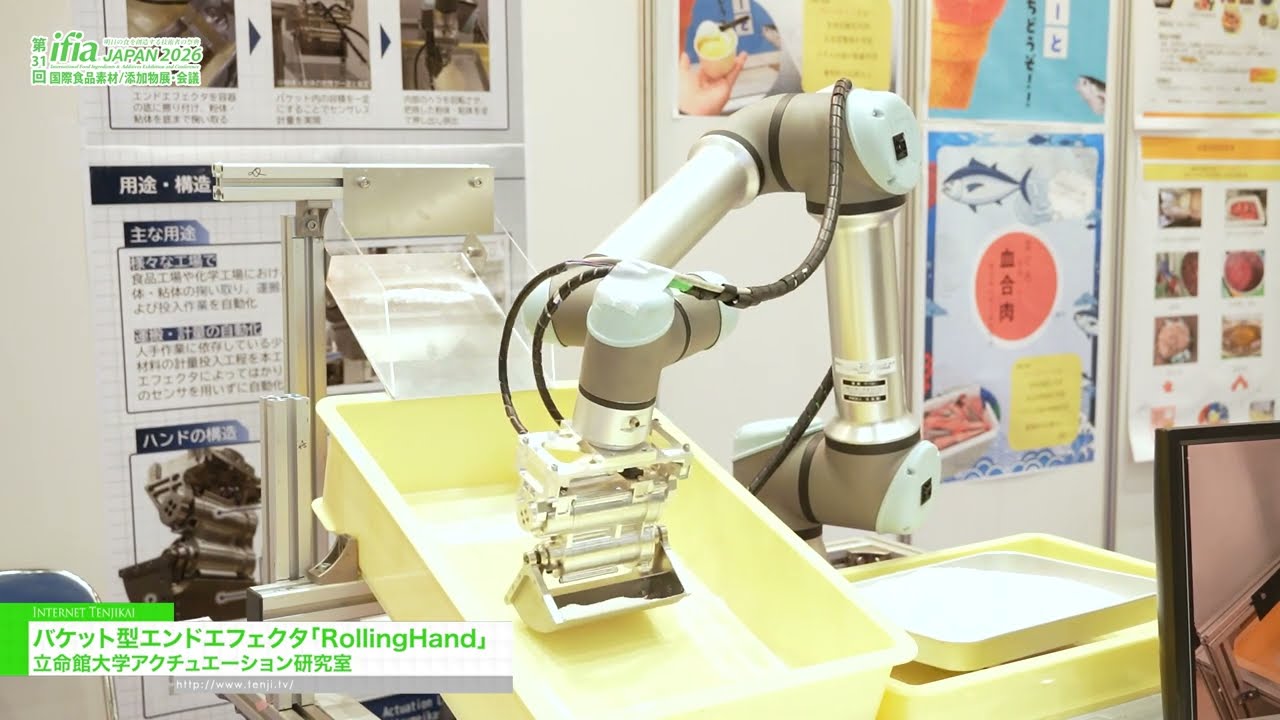
Le laboratoire a développé un effecteur terminal reposant sur une structure flexible appelée Rolling Hand, capable de prélever des matériaux au fond d’un récipient tout en saisissant rapidement une quantité définie, dans le but d’améliorer l’efficacité de l’automatisation dans les usines agroalimentaires.
Défis Résolus
FAQ
Quelles sont les caractéristiques du Rolling Hand ?
Pour quelles applications cette technologie est-elle conçue ?
Quelle est la différence par rapport aux méthodes conventionnelles ?
Voir la transcription vidéo
Nous sommes le laboratoire Kakogawa de l’Université Ritsumeikan.
Nous avons développé un effecteur terminal appelé Rolling Hand, qui constitue la partie préhensive d’un robot conçu pour saisir des quantités définies de matériaux pulvérulents dans l’industrie alimentaire. Nous souhaitons aujourd’hui vous présenter cette technologie.
Actuellement, de nombreux processus d’alimentation en matières premières, notamment les poudres utilisées dans les industries agroalimentaire et chimique, dépendent encore fortement du travail manuel. Notre objectif est donc d’automatiser ces opérations.
L’une des caractéristiques de ce système est sa capacité à prélever des matériaux jusqu’au fond d’un récipient contenant de la poudre.
Les robots industriels conventionnels évitent généralement le contact avec les objets, car celui-ci est considéré comme risqué. Cependant, la main robotique que nous avons développée possède une structure flexible lui permettant d’atteindre le fond du récipient pour y prélever les matériaux.
Une autre caractéristique est sa capacité à saisir une quantité constante. En limitant le volume interne d’un récipient de type godet et en ajoutant un mouvement de nivellement par le haut, nous avons développé cet effecteur terminal en nous inspirant de la manière dont les humains utilisent des cuillères doseuses.
Le matériau est prélevé, nivelé, dosé en quantité fixe puis transféré vers l’équipement de traitement.
Par rapport aux systèmes conventionnels utilisant des balances pour le dosage quantitatif, ce procédé permet d’effectuer l’opération beaucoup plus rapidement.
Nous collaborons actuellement avec une jeune entreprise qui utilise ce type de système pour le dosage de matières premières avant expédition, et nous poursuivons les travaux de développement en vue de sa commercialisation.
Si cette technologie ou cette initiative vous intéresse, veuillez consulter le site du laboratoire Kakogawa au sein de l’Actuation Laboratory de l’Université Ritsumeikan, où vous trouverez les coordonnées nécessaires.
Merci beaucoup.
Contactez-nous